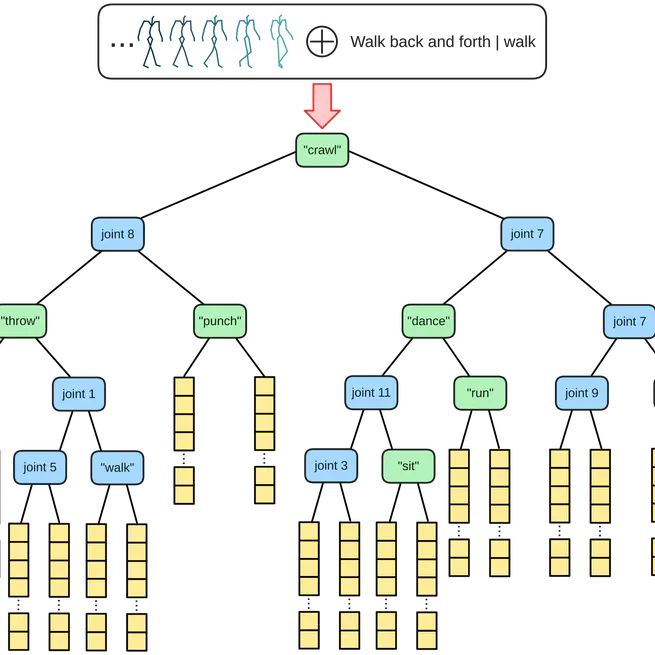
Towards Explainable Human Motion Prediction in Collaborative Robotics
Michael Vanuzzo, Francesco Borsatti, Marco Casarin, Mattia Guidolin, Monica Reggiani, Stefano Michieletto
Predicting human motion is challenging due to its complex and non-deterministic nature. This is particularly true in the context of Collaborative Robotics, where the presence of the robot significantly influences human movements.
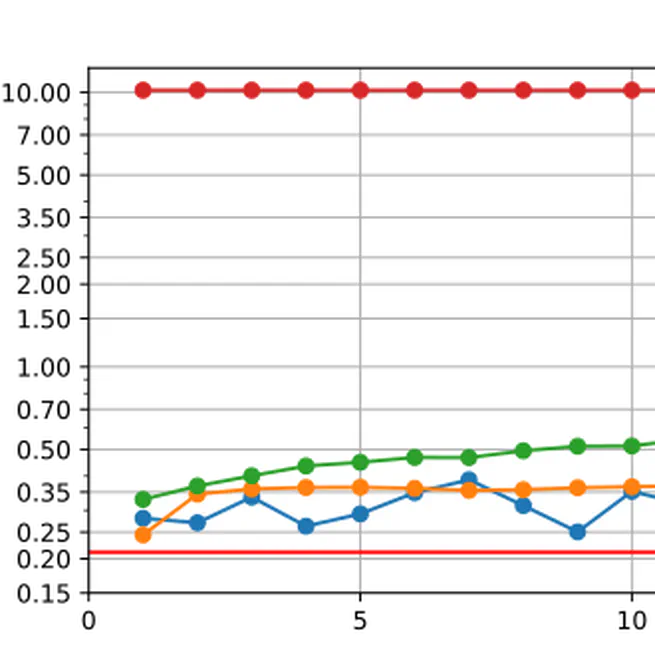
Human Motion Prediction Metrics: from Time to Frequency
Michael Vanuzzo, Marco Casarin, Mattia Guidolin, Stefano Michieletto, Monica Reggiani
Collaborative robotics has the potential to revolutionize industrial applications by integrating human and robot capabilities. However, for efficient and seamless collaboration, predicting human motion is essential. This allows robots to dynamically adjust their behavior and avoid potential collisions.
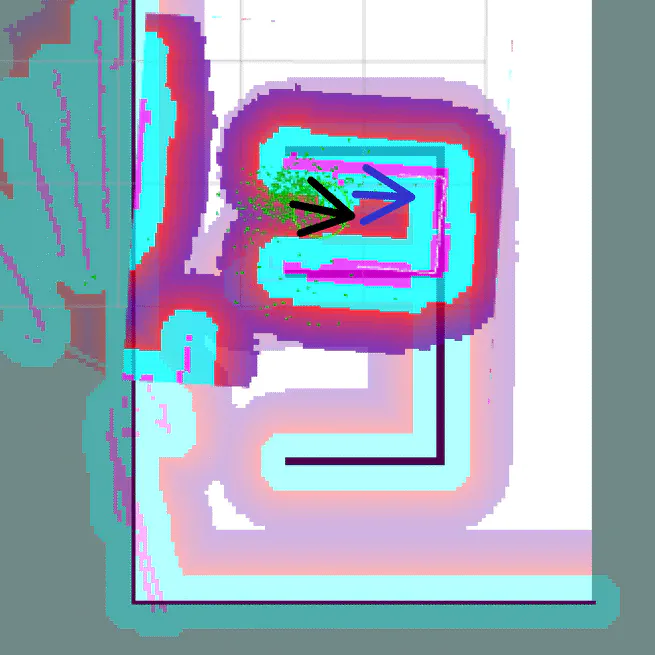
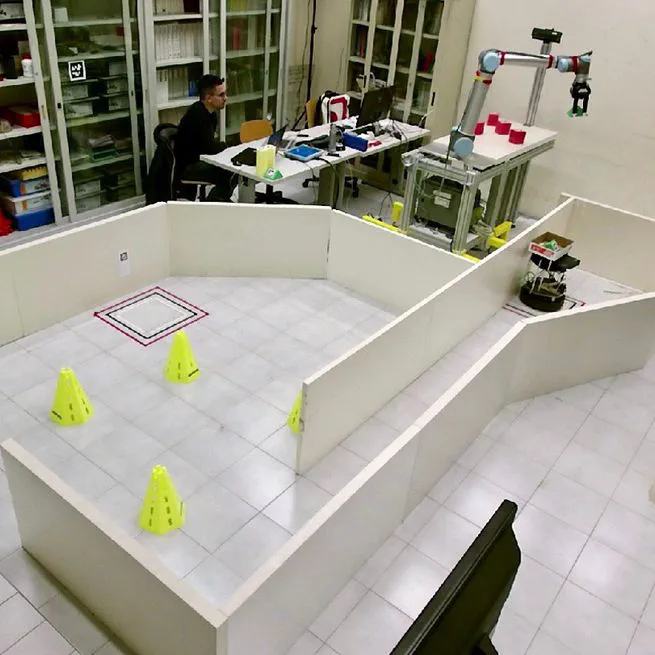
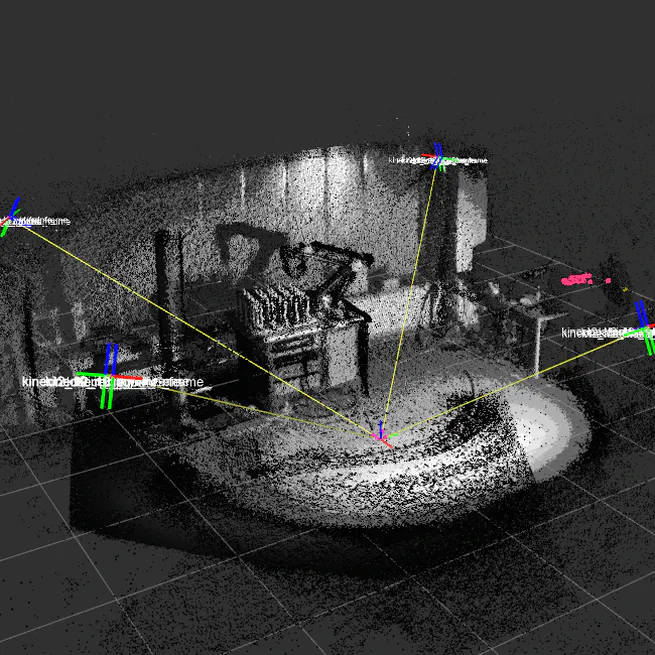
Towards a Low-Cost Robot Navigation Approach based on a RGB-D Sensor Network
Massimiliano Bertoni, Stefano Michieletto, Giulia Michieletto
Motivated by the recent interest in the modernization of the traditional manufacturing facilities, this work focuses on the development of an automated warehouse where mobile manipulators autonomously navigate in the environment by exploiting additional spatial information gathered by a network of fixed RGB-D sensors.
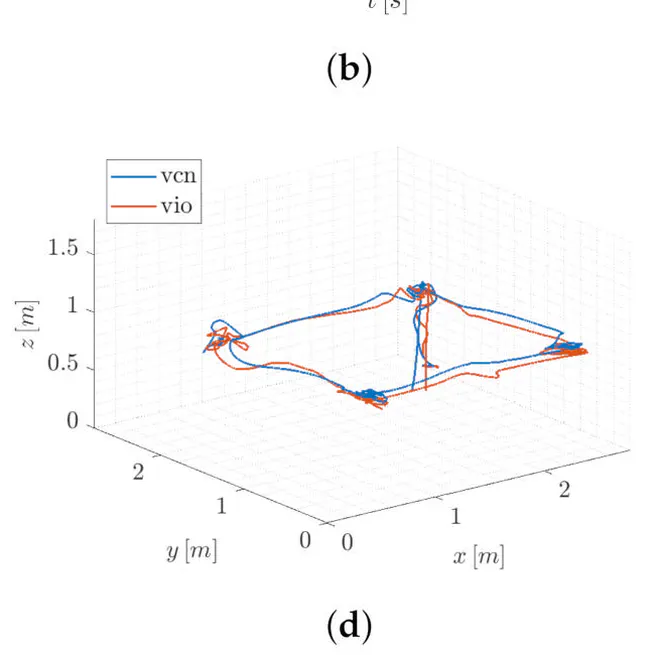
Indoor visual-based localization system for multi-rotor uavs
Massimiliano Bertoni, Stefano Michieletto, Roberto Oboe, Giulia Michieletto
Industry 4.0, smart homes, and the Internet of Things are boosting the employment of autonomous aerial vehicles in indoor environments, where localization is still challenging, especially in the case of close and cluttered areas.
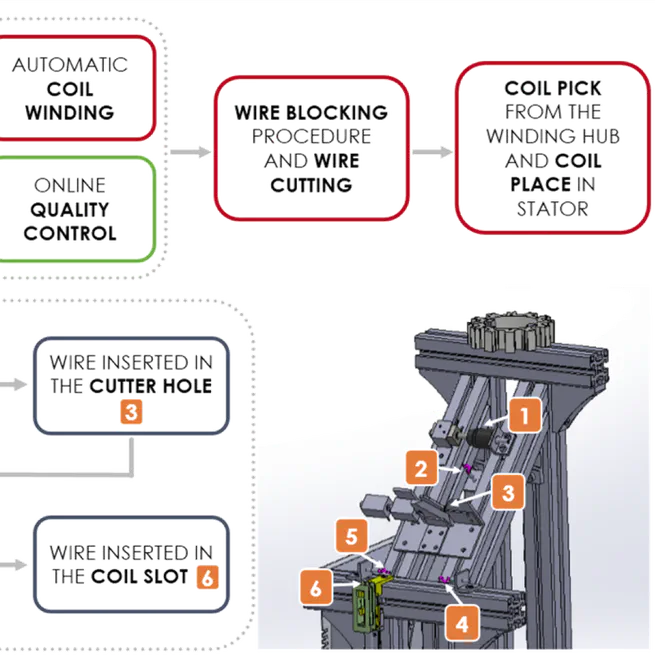
A probabilistic approach to reconfigurable interactive manufacturing and coil winding for Industry 4.0
Stefano Michieletto, Francesca Stival, Enrico Pagello
The robotic industry needs new, innovative, ideas to be globally competitive. Conventional industrial robots are not able to adapt to changes in the assembly processes. Flexible assembly applications are actually uncommon and only isolated attempts exploit industrial robots to perform tasks with variability in the parts.
Teaching robot programming for industry 4.0
Elisa Tosello, Nicola Castaman, Stefano Michieletto, Emanuele Menegatti
This paper presents a master course project on intelligent robotics offered by the University of Padova (Italy). The goal is that of training Master students for Industry 4.0 by offering a multidisciplinary laboratory experience in which two robots and a human must collaborate to fulfill an assembly task: one manipulator robot has to recognize some pieces on a table, manipulate them, and place them on the top of a mobile robot.
Low-cost scalable people tracking system for human-robot collaboration in industrial environment
Matteo Terreran, Edoardo Lamon, Stefano Michieletto, Enrico Pagello
Human-robot collaboration is one of the key elements in the Industry 4.0 revolution, aiming to a close and direct collaboration between robots and human workers to reach higher productivity and improved ergonomics.
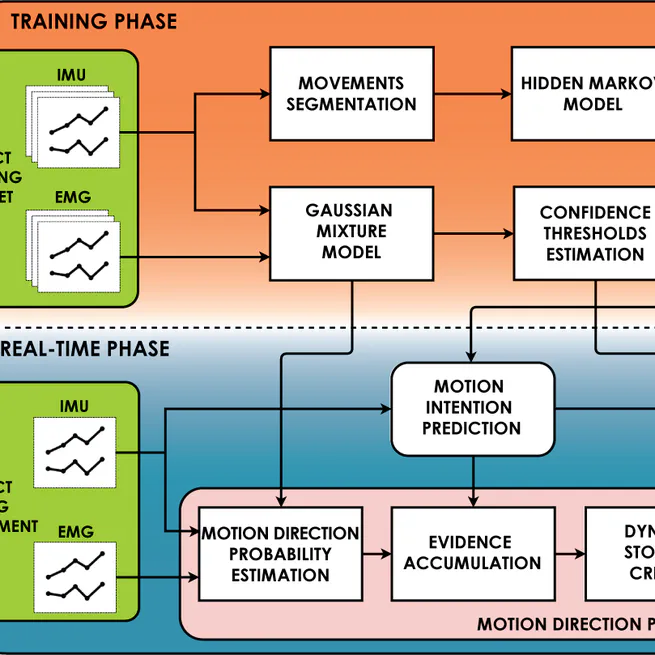
Fast human motion prediction for human-robot collaboration with wearable interface
Stefano Tortora, Stefano Michieletto, Francesca Stival, Emanuele Menegatti
In this paper, we propose a novel human-robot interface capable to anticipate the user intention while performing reaching movements on a working bench in order to plan the action of a collaborative robot.
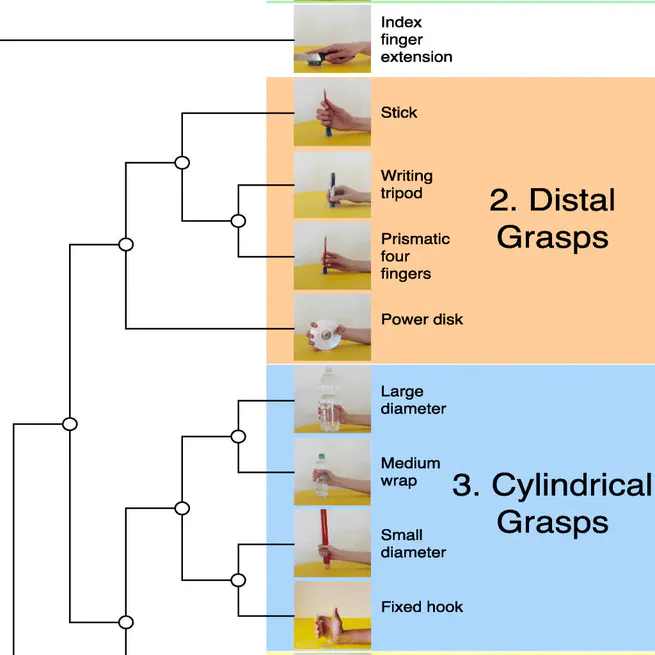
A quantitative taxonomy of human hand grasps
Francesca Stival, Stefano Michieletto, Matteo Cognolato, Enrico Pagello, Henning Müller, Manfredo Atzori
This paper presents to the best of our knowledge the first quantitative taxonomy of hand grasps based on biomedical data measurements. The taxonomy is based on electromyography and kinematic data recorded from 40 healthy subjects performing 20 unique hand grasps.
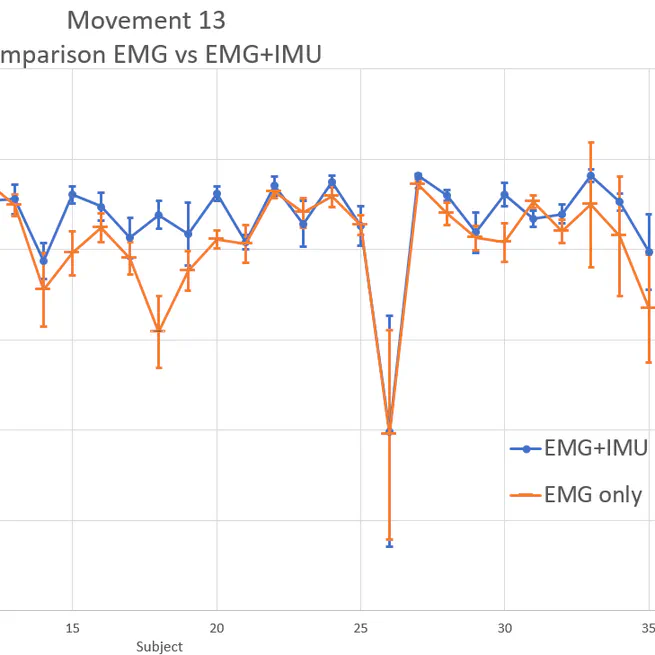
Toward a better robotic hand prosthesis control: using EMG and IMU features for a subject independent multi joint regression model
Francesca Stival, Stefano Michieletto, Andrea De Agnoi, Enrico Pagello
The interest on wearable prosthetic devices has boost the research for a robust framework to help injured subjects to regain their lost functionality. A great number of solutions exploit physiological human signals, such as Electromyography (EMG), to naturally control the prosthesis, reproducing what happens in the human limbs.