Toward a better robotic hand prosthesis control: using EMG and IMU features for a subject independent multi joint regression model
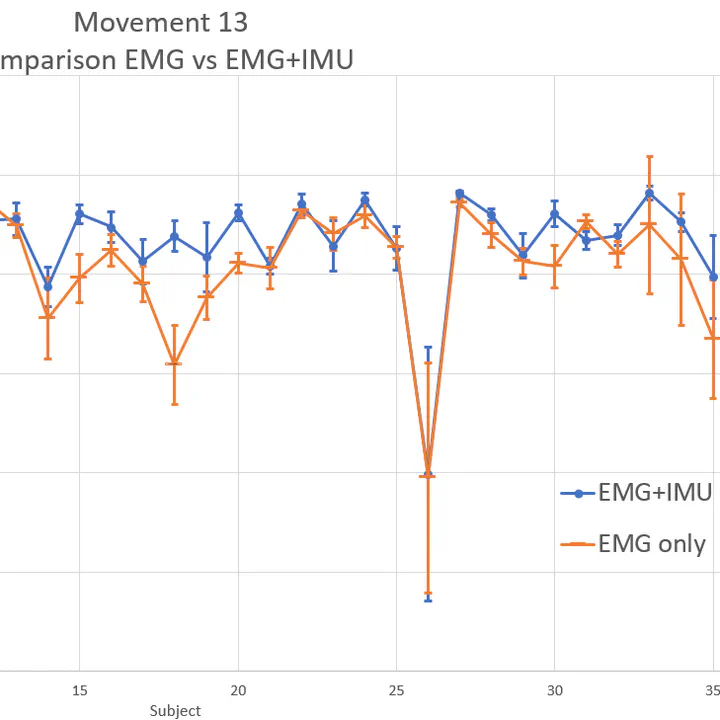
The interest on wearable prosthetic devices has boost the research for a robust framework to help injured subjects to regain their lost functionality. A great number of solutions exploit physiological human signals, such as Electromyography (EMG), to naturally control the prosthesis, reproducing what happens in the human limbs. In this paper, we propose for the first time a way to integrate EMG signals with Inertial Measurement Unit (IMU) information, as a way to improve subject-independent models for controlling robotic hands. EMG data are very sensitive to both physical and physiological variations, and this is particularly true between different subjects. The introduction of IMUs aims at enriching the subject-independent model, making it more robust with information not strictly dependent from the physiological characteristics of the subject