Fast human motion prediction for human-robot collaboration with wearable interface
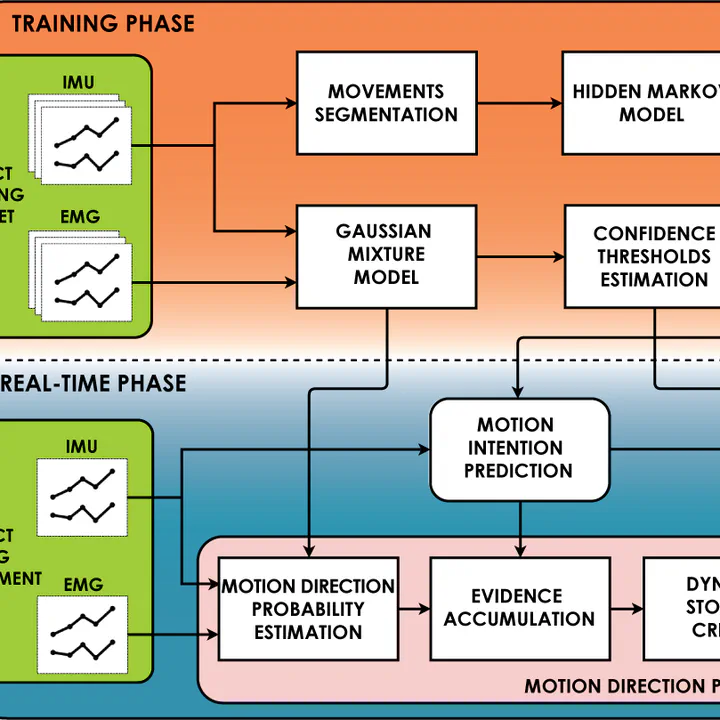
In this paper, we propose a novel human-robot interface capable to anticipate the user intention while performing reaching movements on a working bench in order to plan the action of a collaborative robot. The system integrates two levels of prediction: motion intention prediction, to detect movements onset and offset; motion direction prediction, based on Gaussian Mixture Model (GMM) trained with IMU and EMG data following an evidence accumulation approach. Novel dynamic stopping criteria have been proposed to flexibly adjust the trade-off between early anticipation and accuracy. Results show that our system outperforms previous methods, achieving a real-time classification accuracy of 94.3±2.9% after 160.0msec±80.0msec from movement onset.